科数网
首页
题库
试卷
学习
VIP
你好
游客,
登录
注册
在线学习
线性代数
第五篇 特征值与矩阵相似
矩阵相似
最后
更新:
2025-08-24 04:41
查看:
627
次
反馈
同步训练
矩阵相似
变换矩阵;相似;合同;等价
## 矩阵相似 **定义** 设 $A, B$ 都是 $n$ 阶矩阵, 若有可逆矩阵 $P$, 使 $$ \boxed{ \boldsymbol{P}^{-1} \boldsymbol{A P}=\boldsymbol{B} } $$ 则称 $B$ 是 $A$ 的相似矩阵,记做$ A \sim B$, 或者说矩阵 $A$ 与 $B$ 相似. 对 $A$ 进行运算 $P^{-1} A P$ 称为对$\boldsymbol{A}$ 进行**相似变换**。 可逆矩阵 $P$ 称为把 $\boldsymbol{A}$ 变成 $\boldsymbol{B}$ 的相似**变换矩阵**. 既然定义有了,现在有一个问题:给你一个矩阵$A$,如何求的他的相似矩阵$B$和$P$, 此时前面学的特征值和特征向量的作用就可以用上了。换句话说,学习特征值与特征向量,是为这里做准备的。 ### 矩阵相似的求法 `例` 求 $A=\left(\begin{array}{ccc}7 & -1 & 7 \\ 2 & -1 & -5 \\ 4 & -8 & 7\end{array}\right)$ 的相似矩阵 解:只需求 1 个相似矩阵时,不妨令 $P=\left[\begin{array}{lll}1 & & \\ & 1 & \\ & & 2\end{array}\right](|P| \neq 0)$ , 则 $\left[\begin{array}{lll}1 & & \\ & 1 & \\ & & 2\end{array}\right]\left[\begin{array}{ccc}7 & -1 & 7 \\ 2 & -1 & -5 \\ 4 & -8 & 7\end{array}\right]\left[\begin{array}{lll}1 & & \\ & 1 & \\ & & 1/2\end{array}\right]$ 即为所球 若需求所有的相似矩阵,对于矩阵 $P$ 满足 $|P| \neq 0$ $\frac{p^*}{|p|} A P$ 即为所求 $\left(p^*=p^{-1}|p|\right)$ 从这里可以看到,如果任给一个矩阵$A$,要求他的相似矩阵,可以有无数个,因此,单纯的说求一个矩阵的相似矩阵,意义不大。 但是,如果我们把B限制为对角形矩阵,则情况立刻不一样,此时变换唯一,且可求解 ## 矩阵相似对角形的求法 先给一个公式,后面 [矩阵与对角形相似](https://kb.kmath.cn/kbase/detail.aspx?id=2598) 会介绍, $$ \boxed{ P^{-1}AP=\Lambda } $$ 把上面这个公式稍微变形一下,左乘$P$,右乘 $P^{-1}$,就得到 $$ \boxed{ A=P \Lambda P^{-1} } $$ 这说明**任意给一个矩阵A,可以找到一个对角形矩阵$\Lambda$ (有些找不到)**, 接下来一个问题,怎么找到这里的$P$和$\Lambda$ ? 答案就是特征值与特征向量。 `例` 设矩阵 $$ A=\left(\begin{array}{rrr} -2 & 1 & 1 \\ 0 & 2 & 0 \\ -4 & 1 & 3 \end{array}\right) $$ 求他的相似矩阵$P$和$\Lambda$ 解: 先求 $A$ 的特征值. $$ \begin{aligned} |A-\lambda E| & =\left|\begin{array}{ccc} -2-\lambda & 1 & 1 \\ 0 & 2-\lambda & 0 \\ -4 & 1 & 3-\lambda \end{array}\right|=(2-\lambda)\left|\begin{array}{cc} -2-\lambda & 1 \\ -4 & 3-\lambda \end{array}\right| \\ & =(2-\lambda)\left(\lambda^2-\lambda-2\right)=-(\lambda+1)(\lambda-2)^2, \end{aligned} $$ 所以 $A$ 的特征值为 $\lambda_1=-1, \lambda_2=\lambda_3=2$ . 再求 $A$ 的特征向量. 当 $\lambda_1=-1$ 时,解方程 $(A+E) x=0$ .由 $$ A+E=\left(\begin{array}{rrr} -1 & 1 & 1 \\ 0 & 3 & 0 \\ -4 & 1 & 4 \end{array}\right) \sim\left(\begin{array}{rrr} 1 & 0 & -1 \\ 0 & 1 & 0 \\ 0 & 0 & 0 \end{array}\right) $$ 得对应的特征向量 $$ p _1=\left(\begin{array}{l} 1 \\ 0 \\ 1 \end{array}\right) $$ 当 $\lambda_2=\lambda_3=2$ 时,解方程 $( A -2 E ) x = 0$ .由 $$ A -2 E =\left(\begin{array}{rrr} -4 & 1 & 1 \\ 0 & 0 & 0 \\ -4 & 1 & 1 \end{array}\right) \simeq\left(\begin{array}{rrr} -4 & 1 & 1 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \end{array}\right), $$ 得对应的线性无关特征向量 $$ \begin{aligned} &p_2=\left(\begin{array}{r} 0 \\ 1 \\ -1 \end{array}\right), p_3=\left(\begin{array}{l} 1 \\ 0 \\ 4 \end{array}\right) \end{aligned} $$ **分析上面的结论**: 通过上面的解,我们找到3个特征值和3个特征向量: $\lambda_1=-1, \lambda_2=\lambda_3=2$ $$ \begin{aligned} &p_1=\left(\begin{array}{r} 1 \\ 0 \\ 1 \end{array}\right), &p_2=\left(\begin{array}{r} 0 \\ 1 \\ -1 \end{array}\right), \quad &p_3=\left(\begin{array}{r} 1 \\ 0 \\ 4 \end{array}\right) \end{aligned} $$ > **我们只要把他们按照对应的位置排好即可,就可以找到相似矩阵**。 **排法1**:使用 $\lambda_1=-1, \lambda_2=\lambda_3=2$ 即 若记 $$ \Lambda_1 =\left( \lambda_1, \lambda_2, \lambda_3 \right)=\left(\begin{array}{rrr} -1 & 0 & 0 \\ 0 & 2 & 0 \\ 1 & 0 & 2 \end{array}\right) $$ $$ P_1 =\left( p _1, p _2, p _3\right)=\left(\begin{array}{rrr} 1 & 0 & 1 \\ 0 & 1 & 0 \\ 1 & -1 & 4 \end{array}\right) $$ 这样$A$就可以表示为 $A=P_1 \Lambda_1 P_1^{-1}$ **排法2**:使用 $\lambda_2=\lambda_3=2,\lambda_1=-1,$ 排列,若记 $$ \Lambda_2 =\left( \lambda_2, \lambda_3, \lambda_1 \right)=\left(\begin{array}{rrr} 2 & 0 & 0 \\ 0 & 2 & 0 \\ 0 & 0 & -1 \end{array}\right) $$ $$ P_2 =\left( p_2, p _3, p _1\right)=\left(\begin{array}{rrr} 0 & 1 & 1 \\ 1 & 0 & 0 \\ -1 & 4 & 1 \\ \end{array}\right) $$ 这样$A$就可以表示为 $A=P_2 \Lambda_2 P_2^{-1}$ 可以看到,因为排法不同,其结果也不同,但是本质是一样的。 **相似的几何意义** 想在捋一捋矩阵相似的几何有意义,我们说过,一个矩阵相当于一个坐标系(不是坐标系里的值), 你原来在$A$空间,通过相似映射后,你变成了$\Lambda$ 空间, 在$\Lambda$的空间里,因为 $\lambda_1=-1$ 所以,沿$x$方向方向相反,而 $\lambda_2=2, \lambda_3=2$, 所以,沿着$y,z$方向,进行了拉伸,参考下图。 通过变换后,下图右图小男孩看起来就漂亮多了 **所以,矩阵相似可以理解为换个空间角度观察认为,而特征值和特征向量相当于给我们找到那个比较的好的空间** 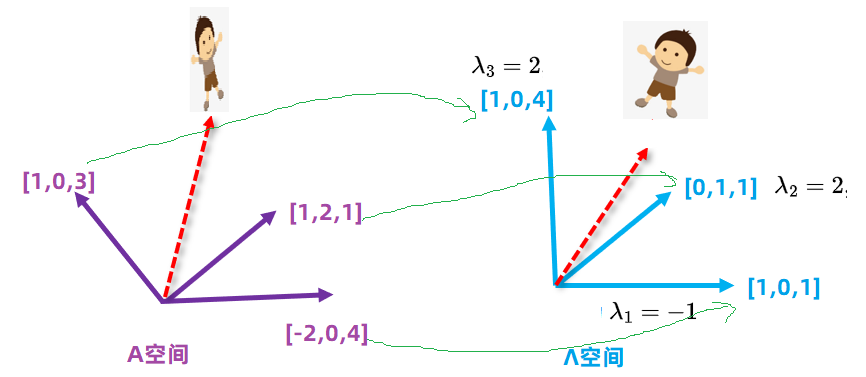 ## 相似矩阵定理 ### 定理 1 若 $n$ 阶矩阵 $A$ 与 $B$ 相似,则 $A$ 与 $B$ 有相同的特征多项式,从而 $A$ 与 $B$ 有相同的特征值. 证明 因 $\boldsymbol{A}$ 与 $\boldsymbol{B}$ 相似,即有可逆矩阵 $P$ ,使 $\boldsymbol{P}^{-1} \boldsymbol{A P}=\boldsymbol{B}$, 故 $$ |\boldsymbol{B}-\lambda \boldsymbol{E}|=\left|\boldsymbol{P}^{-1} \boldsymbol{A} \boldsymbol{P}-\boldsymbol{P}^{-1}(\lambda \boldsymbol{E}) \boldsymbol{P}\right|=\left|\boldsymbol{P}^{-1}(\boldsymbol{A}-\lambda \boldsymbol{E}) \boldsymbol{P}\right|=\left|\boldsymbol{P}^{-1}\right| \cdot|\boldsymbol{A}-\lambda \boldsymbol{E}| \cdot|\boldsymbol{P}|=|\boldsymbol{A}-\lambda \boldsymbol{E}| . $$ ### 推论 若 $n$ 阶矩阵 $A$ 与对角阵 $$ \Lambda=\left(\begin{array}{llll} \lambda_1 & & & \\ & \lambda_2 & & \\ & \ddots & \\ & & \lambda_n \end{array}\right) $$ 相似,则 $\lambda_1, \lambda_2, \cdots, \lambda_n$ 即是 $A$ 的 $n$ 个特征值. 证明:若 $n$ 阶矩阵 $A$ 与 $B$ 相似,即 $P^{-1} A P=B$ ,则 $A^k=\left(P B P^{-1}\right)^k=P B^k P^{-1}$ ,并且 $A$ 的多项式 $$ \begin{aligned} & \varphi(A)=a_m A^m+\cdots+a_1 A+a_0 E=a_m\left(P B P^{-1}\right)^m+\cdots+a_1\left(P B P^{-1}\right)+a_0 E=a_m\left(P B^m P^{-1}\right)+\cdots+a_1\left(P B P^{-1}\right)+a_0 E \\ &=P\left(a_m B^m\right) P^{-1}+\cdots+P\left(a_1 B\right) P^{-1}+P\left(a_0 E\right) P^{-1}=P\left(a_m B^m+\cdots+a_1 B+a_0 E\right) \end{aligned} $$ > 特别地,若有可逆矩阵 $P$ ,使 $P^{-1} A P=\Lambda$ 为对角阵,则$A^k=P \Lambda^k P^{-1}, \varphi(A)=P\varphi(\Lambda) P^{-1}$ 而对于对角阵 $\Lambda=\operatorname{diag}\left(\lambda_1, \lambda_2, \cdots, \lambda_n\right)$ ,有 $$ \boldsymbol{\Lambda}^k=\left(\begin{array}{cccc} \lambda_1^k & & & \\ & \lambda_2^k & & \\ & & \ddots & \\ & & & \lambda_n^k \end{array}\right), \quad \varphi(\boldsymbol{\Lambda})=\left(\begin{array}{llll} \varphi\left(\lambda_1\right) & & & \\ & \varphi\left(\lambda_2\right) & & \\ & & \ddots & \\ & & & \varphi\left(\lambda_n\right) \end{array}\right) \text
免费注册看余下 50%
非VIP会员每天15篇文章,开通VIP 无限制查看
上一篇:
特征子空间的几何意义
下一篇:
矩阵相似的几何意义
本文对您是否有用?
有用
(
0
)
无用
(
0
)
更多
学习首页
数学试卷
同步训练
投稿
题库下载
会议预约系统
数学公式
关于
科数网是专业专业的数学网站 版权所有 本站部分教程采用AI辅助生成,请学习时自行鉴别
如果页面无法显示请联系 18155261033 或 983506039@qq.com