切换科目
重点科目
主要科目
次要科目
科数网
首页
刷题
学习
VIP会员
赞助
组卷
集合
教材
VIP
写作
游客,
登录
注册
在线学习
线性代数
附录3:再看线性代数的意义
最后
更新:
2025-01-09 21:16
查看:
469
次
反馈
能力测评
会员8.2元/月
赞助
附录3:再看线性代数的意义
在附录2里,介绍了矩阵等价。相似与合同的意义,这里进一步解释《线性变换》。线性变换可以有两种模式:(1)同一个空间里不同基坐标变换和(2)不同空间里不同基坐标变换。 > 通俗的说,第一种模式,类似A和B在戏台上看起,虽然看的角度不同,但是核心是同一个演员。第二种模式,一个蜡烛照在地球仪上,墙上出现地球的影子。这样球体的三维空间就被映射到平面上二维空间。 ### 矩阵相似例题 上一节,介绍了一个坐标系镜像的例子,再来看一下这个例子。 `例` 设有一线性变换: 如图 5-49所示, 它将任意向量 $\left(\begin{array}{l}x \\ y\end{array}\right)$ 映射为关于 $45^{\circ}$ 直线的镜像 $\left(\begin{array}{l}y \\ x\end{array}\right)$ 。 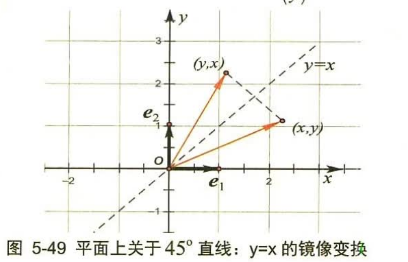 解:取直角坐标系, 其标准正交基 $\boldsymbol{e}_1=\left(\begin{array}{l}1 \\ 0\end{array}\right)$ 和 $\boldsymbol{e}_2=\left(\begin{array}{l}0 \\ 1\end{array}\right)$, 根据线性变换的矩阵定理, 则相应的线性变换矩阵 $A$ 容易求出。因为 $A$ 将 $e_1$ 映射为 $e_2$, 将 $e_2$ 映射为 $e_1$, 所以这个镜像映射在基 $e_1$ 和 $e_2$ 下的坐标表达式为 $$ \left(\begin{array}{l} y \\ x \end{array}\right)=\left[\begin{array}{ll} 0 & 1 \\ 1 & 0 \end{array}\right]\left(\begin{array}{l} x \\ y \end{array}\right) $$ 其中把变换矩阵记为 $[\boldsymbol{A}]_e=\left[\begin{array}{ll}0 & 1 \\ 1 & 0\end{array}\right]$, 表示矩阵 $\boldsymbol{A}$ 是以 $\boldsymbol{e}_i$ 为基的。 下面我们再找一个新的基底 (见图 5-50), 使得新的基向量之一 $\boldsymbol{e}_1{ }^{\prime}$ 沿着 $45^{\circ}$ 直线, 即 $\boldsymbol{e}_1{ }^{\prime}=\left(\begin{array}{l}1 \\ 1\end{array}\right)$,而另一个基向量与之垂直, 即 $\boldsymbol{e}_2{ }^{\prime}=\left(\begin{array}{c}-1 \\ 1\end{array}\right)$ 。则新基与旧基的转换关系为 $$ \left\{\begin{array}{l} \boldsymbol{e}_1^{\prime}=\boldsymbol{e}_1+\boldsymbol{e}_2 \\ \boldsymbol{e}_2^{\prime}=-\boldsymbol{e}_1+\boldsymbol{e}_2 \end{array}\right. $$ 将其改写为 $$ \left(e_1^{\prime}, e_2^{\prime}\right)=\left(e_1, e_2\right)\left[\begin{array}{cc} 1 & -1 \\ 1 & 1 \end{array}\right] $$ 其中把基变换矩阵记为 $\boldsymbol{P}=\left[\begin{array}{cc}1 & -1 \\ 1 & 1\end{array}\right]$ 。 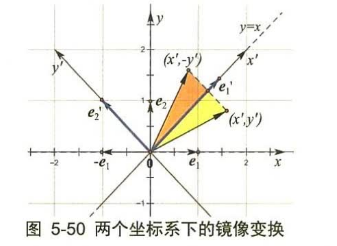 在这组新基上, 这个镜像运动的线性变换 $A$ 事实上被简化了。因为新基向量 $e_1{ }^{\prime}$ 在 $45^{\circ}$ 直线上,它是它本身的镜像, 即 $A e_1{ }^{\prime}=e_1{ }^{\prime}$ 。另一个新基向量 $\boldsymbol{e}_2{ }^{\prime}$ 正好被翻转过来, 即 $A e_2{ }^{\prime}=-e_2{ }^{\prime}$ 。于是,原矩阵 $\boldsymbol{A}$ 所表示的线性变换在新基 $\boldsymbol{e}_1{ }^{\prime}$ 和 $\boldsymbol{e}_2{ }^{\prime}$ 下的坐标表达式为 $$ \left(\begin{array}{c} x^{\prime} \\ -y^{\prime} \end{array}\right)=\left[\begin{array}{cc} 1 & 0 \\ 0 & -1 \end{array}\right]\left(\begin{array}{l} x^{\prime} \\ y^{\prime} \end{array}\right) $$ 其中把线性变换矩阵记为 $[\boldsymbol{B}]_{e^{\prime}}=\left[\begin{array}{cc}1 & 0 \\ 0 & -1\end{array}\right]$, 表示矩阵 $\boldsymbol{B}$ 是以 $\boldsymbol{e}_{\boldsymbol{i}}{ }^{\prime}$ 为基的。 这个矩阵 $\boldsymbol{B}$ 与单位矩阵很接近, 确实比较简单。 **这里矩阵$A$ 和$B$ 是一对相似矩阵, 因为他们都是表示的同一变换 “关于固定的一直线的镜像映射”。** 好了, 下面把这个例子捋一捋: (1) 矩阵 $\boldsymbol{A}$ 和 $\boldsymbol{B}$ 是一对相似矩阵, 因为哥俩都是表示的同一变换 “关于固定的一直线的镜像映射”。 (2) 矩阵 $\boldsymbol{P}$ 是基变换矩阵, 把一个旧基换成另一个新基, 乘以 $\boldsymbol{P}$;回去是乘以 $\boldsymbol{P}^{-1}$ 。详见[过渡矩阵](https://kb.kmath.cn/kbase/detail.aspx?id=490) (3) 矩阵 $\boldsymbol{P}$ 的每个列都是由 $\boldsymbol{A}$ 的特征向量组成的,特征向量用旧基上的坐标表示。 (4) 矩阵 $\boldsymbol{B}$ 是简单的对角阵, 对角上的元素就是特征值, 从左上到右下排列的特征值分别对应着 $\boldsymbol{P}$ 矩阵的从左到右排列的特征向量。 (5) $\boldsymbol{A}$ 和 $\boldsymbol{B}$ 俩矩阵既然表示同样的线性变换, 因此特征值也是同样的, 它和基没关系。 **相似矩阵 $A$ 和 $B$ 是同一个线性变换在两个不同基下的表示矩阵。** 这也是相似矩阵的几何意义啊。 打个比方说, 就像两个观众看一场演出, 台上演员的某一演出动作就是一个变换, 是实实在在的、唯物主义的不以谁看为转移的一个变换。但是两个观众张三和李四的位置不一样, 从不同角度观看, 这就是取的坐标不同, 基不同了。显然, 基不同, 看到的演员的动作也不同了。扮演猴子的演员在舞台中间从左往右翻跟头, 假设演员功夫好, 翻的是标准的圆周运动。左前方的张三看起来猴子的 “跟头” 变换是顺时针椭圆周运动, 此运动表示为矩阵 $A$; 在后方一角落的李四 (李四是剧团工作人员, 在帷幕后面闲看) 看起来猴子的 “跟头” 变换是逆时针椭圆周运动, 此运动表示为矩阵 $\boldsymbol{B}$ 。两个人看到的运动应是差不多的, 很相似, 因此 $\boldsymbol{A}$ 和 $\boldsymbol{B}$ 称为相似矩阵 (注意: 不止这两人, 所有的观众看到的运动都是相似矩阵)。 还有第三个人王二麻子很明智, 知道两个人看的运动有些走样了。就到观众席的正中央正襟危坐观看, 呵! 标准的圆周运动。王二麻子告诉我们: 在一大堆相似矩阵中, 正面的矩阵看起来不走样, 最爽 (矩阵有用啊, 证明了为何前排中间的位置票价最贵啊)。 下面咱们回归到两个基下的线性变换的讨论上来。 如图 5-48 所示, 矩阵 $\boldsymbol{A}$ 表示一个线性变换, 把一个向量 $\boldsymbol{x}$ 变换成另一个向量 $\boldsymbol{A x}: \boldsymbol{x} \rightarrow \boldsymbol{A x}$ (这是张三看到的演出动作); 在另外一个基下 (等于换了一个坐标系, 改变了观察角度), 同样的一个变换动作表示成了 $\boldsymbol{x^{\prime}} \rightarrow \boldsymbol{B x'}$ (这是李四看到的演出动作)。 从张三的坐标系变换到李四的坐标系, 就要乘以一个 $\boldsymbol{P}$ (图 5-48中给出的是向量 $\boldsymbol{x}$ 的变换,因此乘以 $\boldsymbol{P}^{-1}$ ); 现实地操作就是张三跑到李四的座位上去就可以了。  这里就描述矩阵在现实世界对应的变化。 ## 矩阵相似对角化 矩阵的对角化有不同的方法, 但我们常常讲的矩阵的对角化, 多数是所谓的相似对角化。 鉴于大家都有花大价钱买甲等票到王二麻子舞台正前方的位置看戏的习惯, 数学家当然也喜欢把一个矩阵相似变换到另一个比较爽的矩阵上去进一步研究这个线性变换。这个最爽的位置就是用特征向量当坐标轴, 最爽的矩阵就是对角阵, 次一些的当算约当阵了。实际上, 这是一个常见的工程处理方法, 把一个对象从一个领域变换到另外一个领域去以便研究(当然要保证被研究对象的本质不能被变换掉)。 1. 相似对角化的好处 举个矩阵相似的事例, 比如我们开车郊游 (图 5-51), 到乡野别院度假。从地点 $\boldsymbol{x}$ 驾驶到目的地 $\boldsymbol{A x}$, 走眼前的小道不太方便, 那就绕个弯, 先从 $\boldsymbol{x}$ 过桥到 $\boldsymbol{x}^{\prime}$, 从 $\boldsymbol{x}^{\prime}$ 到 $\boldsymbol{B} \boldsymbol{x}^{\prime}$ 的行车就很方便, 处理简单。可到了 $B x^{\prime}$ 还没完啊, 度假目的地是 $A x$ 啊。好, 再过桥把 $B x^{\prime}$ 变到 $A x$ 。 确实, 走笔直的马路当然比走九曲十八弯爽了。这里的马路也是对角阵。数学上的对角阵看起来爽, 除了对角线上外其
免费注册 查看余下70%
《高等数学》难点解析
高数教程
泰勒公式
切线与法线
切平面与法平面
驻点·拐点·极值点·零点
间断点
渐进线
瑕积分
欧拉方程
伯努利方程
Abel 收敛定理
偏导数的几何意义
偏导数的几何意义
梯度
数量场与向量场
多元函数极值
拉格朗日算子
通量与散度
环流量与旋度
格林公式
高斯公式
斯托克斯公式
三大公式比较
傅里叶级数
极坐标微元
点法式方程
变上限定积分
X型计算面积
Y型计算面积
微分的意义
渐近线
间断点
y''+py'+qy=f(x)方程
高斯
黎曼
傅里叶变换(复数)
拉普拉斯变换(复数)
高等数学测评
函数与极限
一元函数微分学
一元函数积分学
微分方程
空间向量与代数
多元微分学
多元积分学
无穷级数
《线性代数》难点解析
线代教程
近世代数对数学的整体思考
线性的意义
矩阵乘法(列视角)
矩阵乘法(行视角)
矩阵左乘
矩阵右乘
逆矩阵求解方程组
阶梯形矩阵的求法
方程组解的判定
四阶行列式的计算
线性变换的意义
线性空间
向量组的等价
线性空间的几何意义
基础解系的求法
施密特正交化
特征值与特征向量的意义
矩阵相似的几何意义
矩阵可对角化的理解
秩的意义(向量版)
秩的意义(方程版)
二次型的意义
线性代数测评
行列式
矩阵
向量空间
《概率论与数理统计》难点解析
概率教程
置信区间与上a分位数
概率中的“取”与“放”
贝叶斯公式
全概率公式
泊松分布
指数分布
伽玛分布
二维密度图的意义
卷积的意义
相关系数的意义
k阶矩是与矩母函数
卡方分布的作用
单正态区间估计理解
假设检验理解
切比雪夫不等式
中心极限定理
概率统计测评
事件与概率
一维随机变量与事件
多维随机变量与事件
随机变量的数字特征
大数定律与中心极限定理
统计量与抽样分布
参数估计
假设检验
上一篇:
附录2: 矩阵的等价、相似与合同意义
下一篇:
线性代数公式
本文对您是否有用?
有用
(
0
)
无用
(
0
)
学习首页
数学试卷
同步训练
投稿
会议预约系统
数学公式
关于
Mathhub
赞助我们
科数网是专业专业的数学网站 版权所有
本站部分教程采用AI制作,请读者自行判别内容是否一定准确
如果页面无法显示请联系 18155261033 或 983506039@qq.com